За допомогою модуля вирівнювання Ekos можна виконувати дуже точне позиціювання, а також вимірювати і виправляти похибки полярного вирівнювання. Усе це можна робити завдяки стороннім засобам прив'язування знімків. Основним засобом, який використовує програма, є пакунок StellearSolver, який, власне, використовує автономні (та засновані на інтернет-технологіях) розв'язувачі astrometry.net, ASTAP та Watney. Ekos розпочинає зі створення знімка зоряного неба, який передає вибраному розв'язувачу (наприклад astrometry.net, StellarSolver або ASTAP). Внаслідок розв'язання зображення програма отримує координати центральної точки (пряме сходження і схилення), масштаб та орієнтацію зображення. Розв'язувач виконує порівняння зі зразками карти зоряного неба, які містять дані мільйонів зірок. Щойно координати буде визначено, можна буде визначити істинне спрямування телескопа.
Часто між даними самого телескопа щодо напрямку, в якому спрямовано телескоп, та справжнім спрямуванням телескопа є суттєві розбіжності. За величиною розбіжності можуть досягати від декількох кутових мінут до декількох градусів. Ekos може виправити ці розбіжності шляхом синхронізації до нових координат із наступним обертанням лафета до позиції, куди мало бути наведено телескоп за наданими користувачем координатами.
Крім того, в Ekos передбачено інструмент допомоги у полярному вирівнюванні для виправлення похибок у полярному вирівнюванні. Програма створює три знімки, обертаючи телескоп між ними, і обчислює зсув між віссю лафета і полярною віссю. Користувачеві надаються дані щодо потрібних для вирівнювання цих осей виправлень висоти і азимута. Знімки, типово буде зроблено поблизу небесного полюса (поблизу Полярної у північній півкулі), але процедура добре працює з будь-якими областями, які, зазвичай, починаються поряд із меридіаном і продовжуються на схід чи захід.
Мінімально, вам потрібний ПЗЗ або вебкамера та телескоп, у якому передбачено команди обертання та синхронізації. У більшості сучасних популярних комерційних телескопах передбачено підтримку таких команд.
Якщо ви користуєтеся модулем вирівнювання Ekos, вирівнювання вашого лафета за контрольними вирівнюваннями 1, 2 або 3 зірок не є строго обов'язковим. Втім, для деяких лафетів рекомендовано виконати грубі вирівнювання для 1 або 2 зірок, перш ніж користуватися модулем вирівнювання Ekos. Якщо ви користуєтеся EQMod, ви можете розпочати користування модулем вирівнювання Ekos без будь-яких додаткових приготувань. Типова процедура для точного вирівнювання складається з таких кроків:
Запустіть KStars і Ekos і встановіть з'єднання з INDI.
Зніміть лафет з паркування у початковій позиції (зазвичай, північний небесний полюс для екваторіальних лафетів).
Наведіть телескоп на сусідню яскраву зірку за допомогою команди наведення телескопа на карті неба з використанням пункту Навести телескоп на позицію вказівника миші.
Виберіть Обертання до цілі у списку Дія розв'язувача на сторінці «Вирівнювання».
Після завершення обертання натисніть кнопку на сторінці «Вирівнювання».
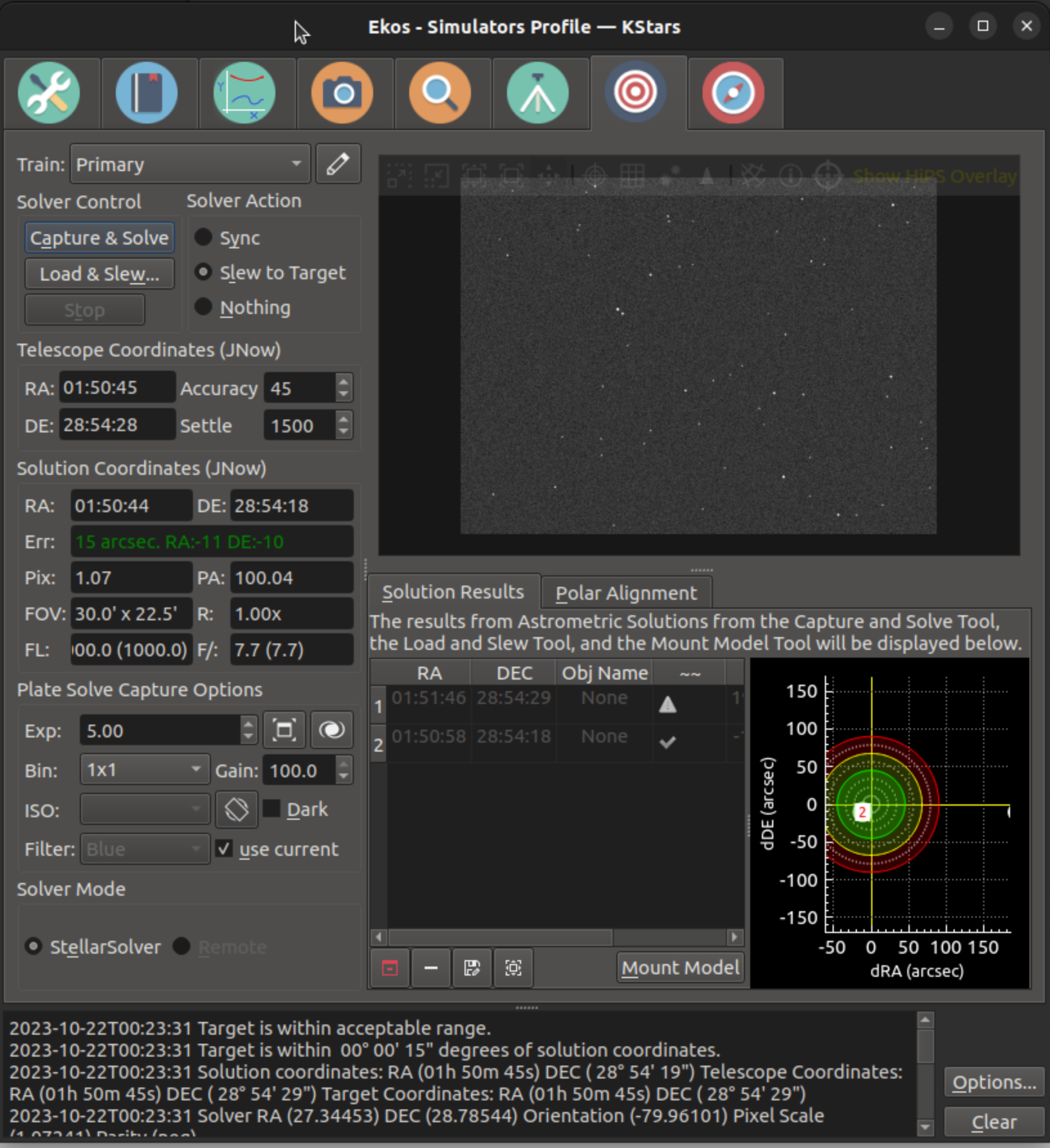
Засіб вирівнювання захоплює зображення і намагається прив'язати його до карти неба. Якщо розв'язання успішно виконано, Ekos надішле команди синхронізації до лафета і наведе його на зірку. Результати буде показано на вкладці Результати розв'язування разом із діаграмою прицілювання, на якій буде показано зсув повідомлених лафетом координат телескопа (тобто координат наведення за даними лафета) відносно справжньої точки на небі, координати якої було визначено розв'язувачем. Вирівнювання буде зупинено, якщо буде досягнуто бажаної точності, інакше процедуру наведення, захоплення, розв'язування і синхронізації буде повторено, аж доки похибка не стане прийнятною.
Кожного разу після виконання процедури розв'язування і повернення успішних результатів Ekos може виконати такі дії:
Синхронізувати: синхронізує координати телескопа із координатами розв'язку.
Обертання до цілі: синхронізувати координати телескопа із координатами розв'язку і навести телескоп на ціль.
Нічого: просто розв'язати зображення і показати координати розв'язку.
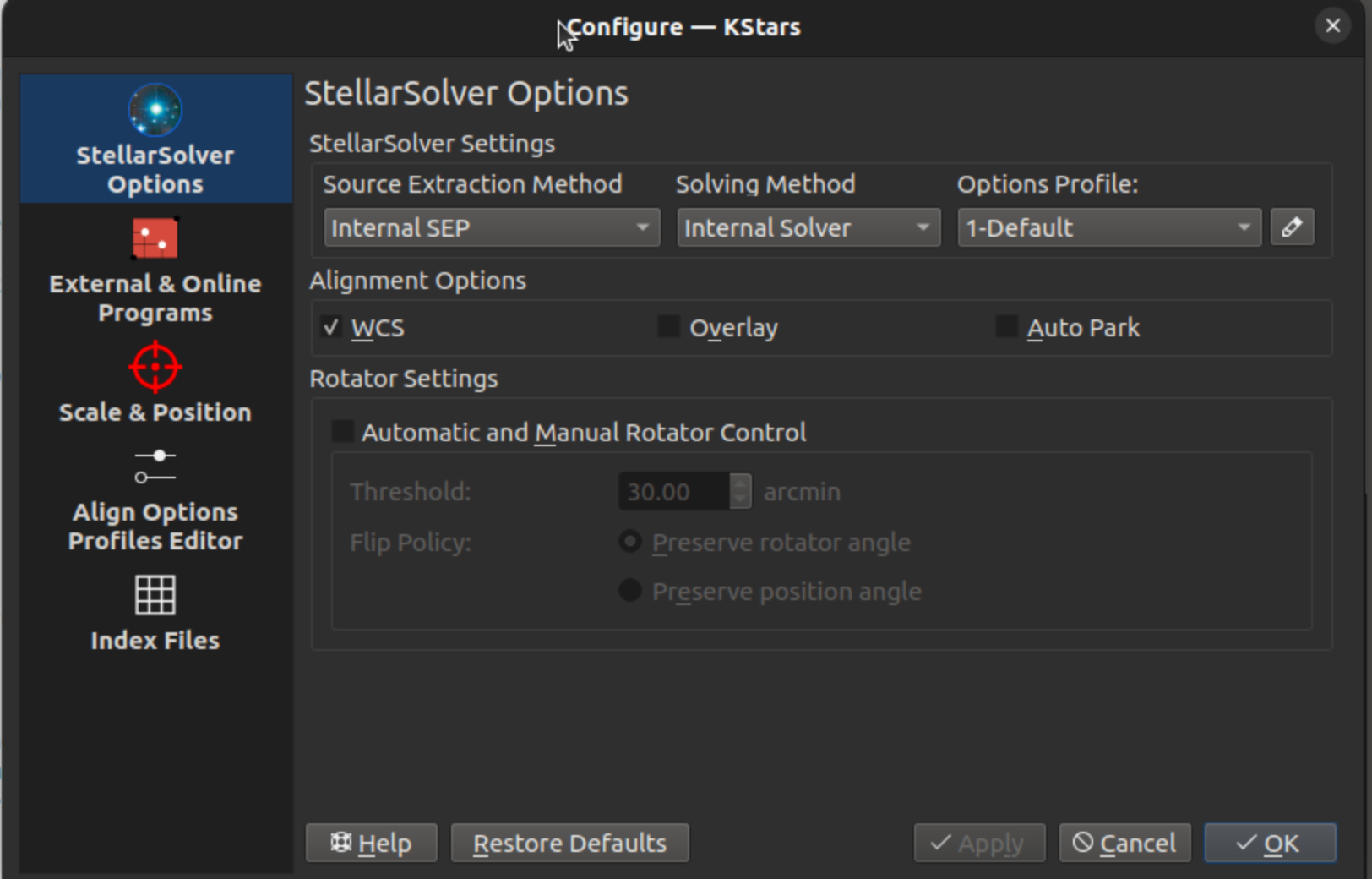
Щоб скористатися розв'язувачами, вам слід спочатку налаштувати параметри StellarSolver. Наведену на знімку вище сторінку буде показано після натискання кнопки Параметри у нижній правій частині сторінки «Вирівнювання» з наступним вибором вкладки Параметри StellarSolver. Почніть з визначення Вбудований метод для розв'язувача для Методу видобування даних з джерела, щоб кожен з розв'язувачів використовував пріоритетний для нього код видобування даних зірок. Для Методу розв'язання ми рекомендуємо вибрати Вбудований розв'язувач, щоб скористатися копією коду Astrometry.net у StellarSolver, або вибрати Локальний ASTAP, якщо ви надаєте перевагу цьому методу. Розв'язувач астрометричних даних з інтернету точний, але отримання розв'язку може бути досить тривалим, оскільки потрібно перенести усі дані. Для пункту Профіль параметрів почніть з варіанта 1-типовий.
Передбачено два інших не таких значних пункти. WCS: всесвітня координатна система є системою координат, яку призначено для визначення екваторіальних координат, які вбудовуються у файл зображення. Під час перегляду прив'язаного зображення ви можете навести вказівник миші на будь-який його піксель і бачити координати цього пікселя. Ви також можете клацнути на будь-якій точці зображення і наказати телескопу навестися на цю точку. Наполегливо рекомендуємо вам не знімати позначки з цього пункту. За допомогою пункту Накладка можна накласти захоплені зображення на карту неба KStars.
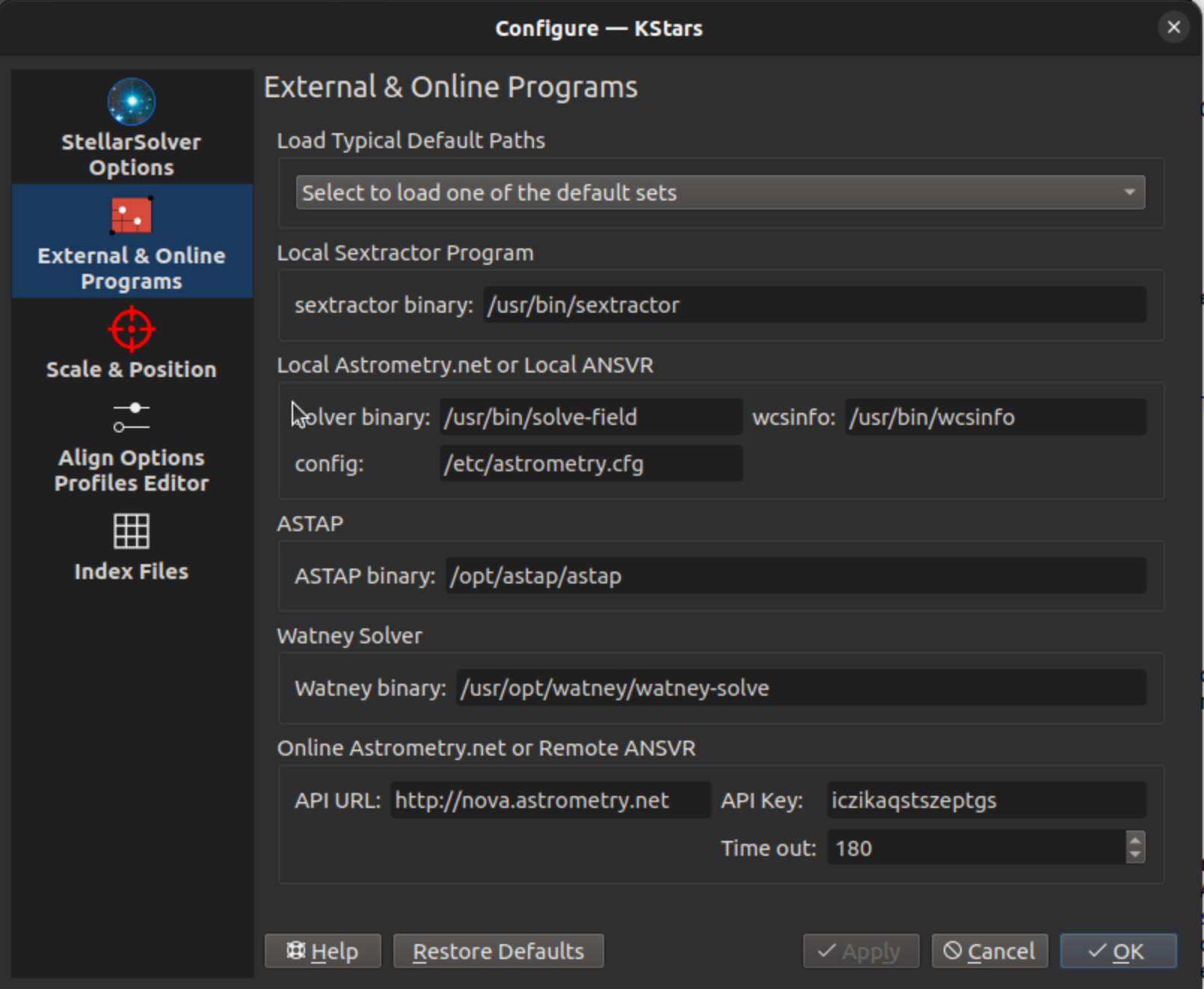
Потреба у цій сторінці виникає, лише якщо ви вибрали одну із зовнішніх програм для пункту Метод розв'язання. Якщо вами вибрано Вбудований розв'язувач, потреби щось змінювати немає.
Вам слід переконатися, що для вибраного вами розв'язувача вказано належні шляхи. За допомогою пункту верхнього меню вибір одного з типових наборів, зазвичай, можна налаштувати вміст полів належним чином.
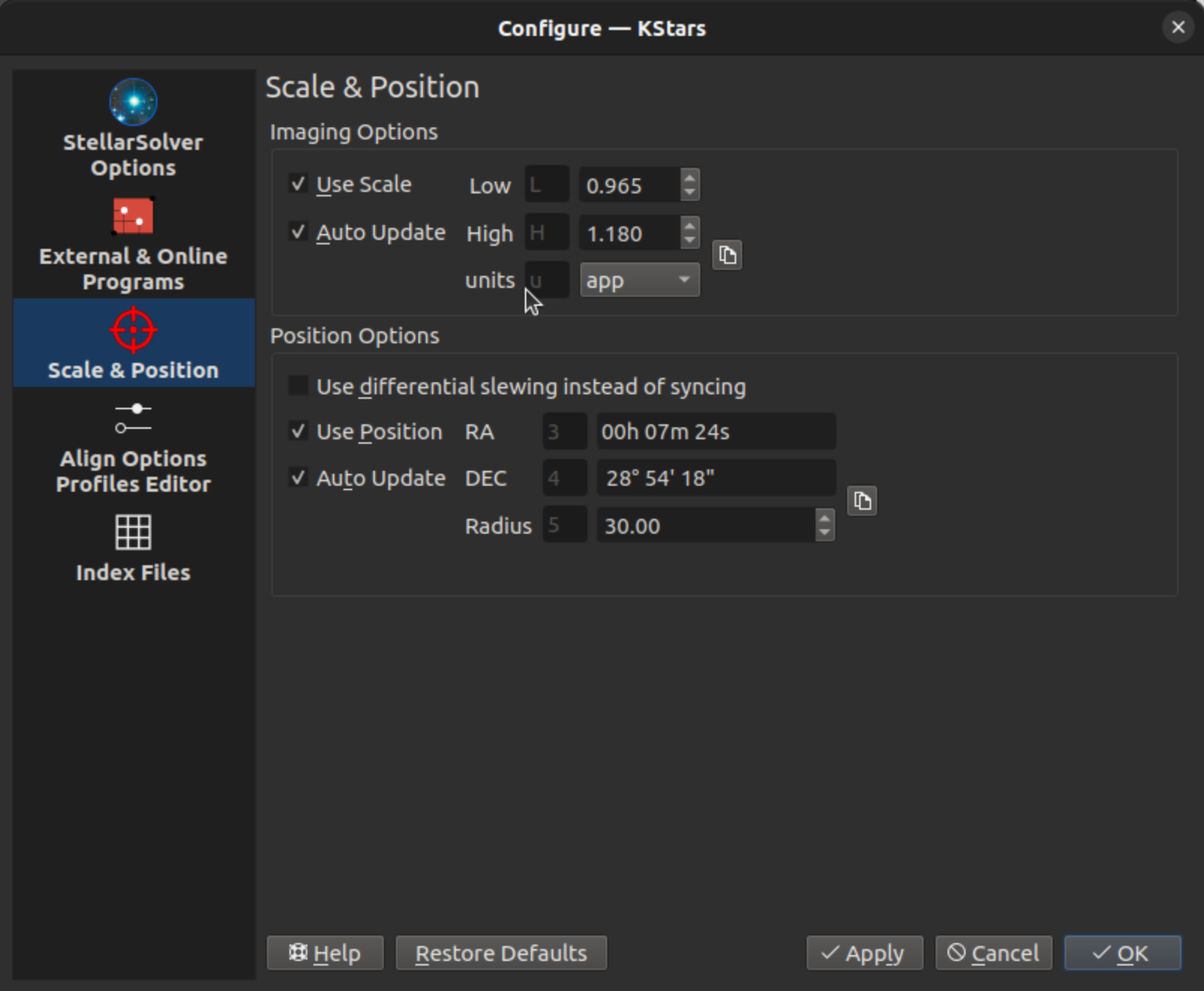
Ця сторінка визначає для Ekos, чи хочете ви обмежити пошук розв'язку знімка за масштабом або позицією.
Масштабом може бути ширина зображення у градусах (dw), ширина зображення у кутових мінутах (aw) або ширина пікселя у кутових секундах (app). Усі варіанти дієздатні, але рекомендованим є варіант із кутовими секундами на піксель. Типово, це обмеження використовують для пришвидшення розв'язування, тому ми рекомендуємо позначити цей пункт. Системі не потрібне точне значення цього параметра — достатньо вказати його зі відхиленням у 10-20%. Втім, часто помилки розв'язування пов'язано із використаним неточним значенням масштабу. Тому, якщо у вас виникають проблеми із прив'язкою зображень, ви можете зняти позначення з пункту Масштаб до вирішення проблем. Зняття позначки з пункту, найімовірніше, призведе до збільшення часу розв'язування. Використання пункту Автооновлення призведе до автоматичного заповнення поля масштабу значенням, яке було отримано під час останнього успішного розв'язування.
Дані для позиції за прямим сходженням і схиленням, зазвичай, буде взято з даних, які автоматично визначено телескопом. Звичайно, система не потребує точного обмеження позиції — пошук позиції і є метою розв'язування знімка. Максимальну відстань у градусах від вказаної до справжньої позиції вказують за допомогою поля Радіус. Розв'язання вважатиметься невдалим, якщо вказану позицію буде розташовано далі. Типово, варто позначити пункт Позиція для пришвидшення розв'язування. Тому ми рекомендуємо позначити цей пункт. Втім, часто проблеми із розв'язанням пов'язано із використанням поганої оцінки позиції (наприклад, через дуже неточне вирівнювання телескопа). Тому, якщо у вас виникають проблеми із розв'язуванням знімків, вам варто зняти позначення з пункту Позиція до вирішення цих проблем. Як ми вже згадували, зняття позначення з пункту призведе до збільшення часу розв'язування. Використання пункту Автооновлення призведе до автоматичного заповнення поля масштабу значенням, яке було отримано під час останнього успішного розв'язування. Втім, наведення призведе до оновлення позиції до позиції, отриманої автоматично самим телескопом.
Ці параметри буде застосовано, якщо ви використовуєте (рекомендований) Вбудований розв'язувач для Методу розв'язання.
Ви можете вибрати Профіль параметрів на вкладці Параметри StellarSolver. Профілі є простими збірками параметрів для налаштовування швидкодії видобування даних зірок і системи розв'язування знімків у StellarSolver. Рекомендуємо для початку скористатися профілем 1-типовий. Передбачено декілька інших можливих профілів, зокрема Large Scale Solving, Small Scale Solving та Single Thread Solving.
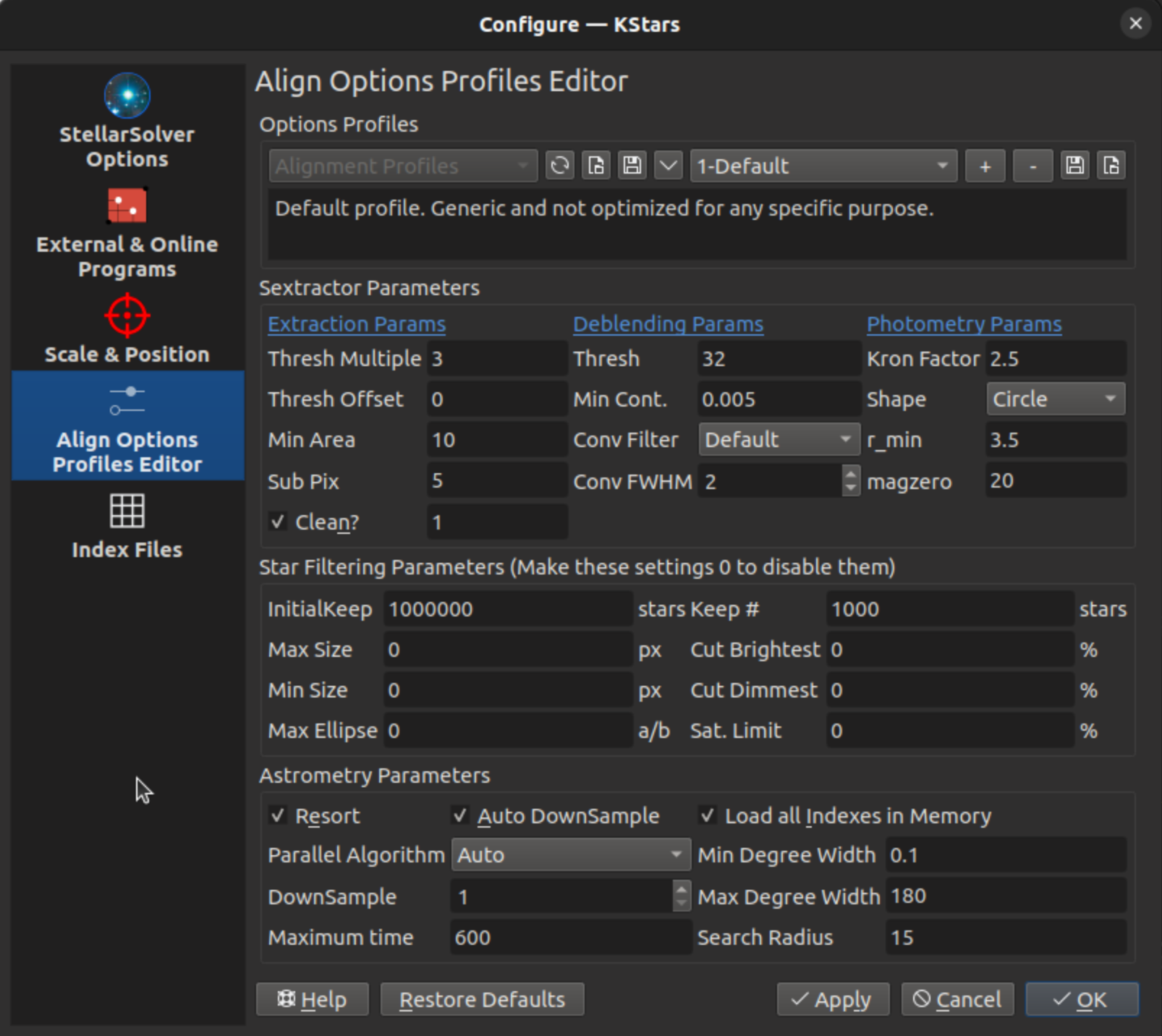
На вкладці Редактор профілю параметрів вирівнювання ви можете переглядати та редагувати профілі. Передбачено багато параметрів, хоча потреби у внесенні змін до більшості цих параметрів з метою вирішення проблем немає. Маємо 3 типи параметрів.
У верхньому розділі із міткою Параметри Sextractor (із заголовками стовпчиків Параметри видобування, Параметри усування змішування і Параметри фотометрії) зібрано параметри видобування даних зірок — параметри, які допомагають програмі знаходити на знімку зірки.
За допомогою другого розділу із міткою Параметри фільтрування зірок можна скоригувати фільтрування та зменшення кількості зірок, дані яких буде видобуто до надсилання списку або розв'язувачу знімка (при вирівнюванні або полярному вирівнюванні), або засобу автофокусування, або вбудованому засобу наведення (коли потрібен лише список зірок).
За допомогою третього розділу із міткою «Параметри астрометрії» можна скоригувати швидкодію засобу розв'язування знімків.
Для усіх полів введення даних передбачено підказки, які буде показано, якщо ви наведете вказівник миші на поле для введення даних.
Ви можете внести зміни до значень і зберегти потрібний вам профіль або відновити початкові значення параметрів профілю.
Заголовки стовпчиків містять посилання на підручник з Sextractor, засобу, який є основним джерелом цих параметрів. Скористайтеся цими посиланнями для ознайомлення із подробицями щодо усіх параметрів. Ми опишемо лише деякі з цих параметрів, які варто спробувати змінити. Втім, ймовірно, найкращим способом налаштовування є використання типових значень більшості з цих параметрів.
Пор. коефіцієнт і Пор. відступ стосуються того, наскільки система буде чутливою до значень пікселів. Рівень тла буде помножено на Пор. коефіцієнт, а потім до отриманого значення додано Пор. зсув. Якщо значення пікселя перевищить результат, його може бути використано для виявлення зірки. Через це, нижчі значення (особливо для коефіцієнта) можуть призвести до того, що навіть тьмяні пікселі призводитимуть до виявлення зірок. Вищі значення зменшують кількість виявлених зірок.
Мін. область визначає мінімальну область для виявлення зірки — область у квадратних пікселях, де усі пікселі мають значення, що перевищують порогове. Якщо алгоритм виявляє невеликі викиди шуму як зірки, вам варто збільшити це значення. Якщо ж алгоритм не виявляє бажані зірки малого розміру, можливо, значення Мін. область є надто великим.
Для значення ПШПМ збіж. слід встановити грубо видиме значення області у пікселях. Зображення буде згладжено на цю величину до започаткування виявлення зірок.
Фільтрування виконують здебільшого для пришвидшення обробки, а також вилучення обрізаних зірок або надто еліптичних об'єктів, які можуть бути галактиками. Ми опишемо декілька параметрів, які можуть потребувати коригування. Нульові значення цих параметрів вимикають фільтрування. Втім, знову ж таки, нагальної потреби у зміні більшості з цих значень немає.
Початкове збереження і К-ть збережених стосуються кількості зірок, яку буде повернено системою. Система спочатку запускає свій алгоритм виявлення і визначає певну кількість можливих виявлених об'єктів. Далі буде виконано фільтрування списку і збережено лише рівну значенню Початкове збереження кількість найяскравіших зірок. Потім буде виконано решту фільтрування, зокрема обчислення РПП для усіх зірок і, нарешті, буде повернуто список, у якому буде не більше К-ть збережених зірок. Для жодного з випадків використання StellarSolver (вирівнювання, автофокусування, наведення) не потрібні тисячі зірок для виконання завдання, а чим більшою є кількість оброблених зірок, тим повільнішою буде обробка. Початкового списку у 1000 зірок і списку з декількох сотень позицій для повернутих зірок має бути достатньо для більшості застосувань.
Параметри Макс. розмір і Мін. розмір фільтрують зірки за розміром (діаметром у пікселях). Використання цих параметрів подібне до параметра Мін. область, який описано вище.
Макс. еліпс визначає, наскільки еліптичною може бути зірка, перш ніж її буде вилучено. 2 означає, що більша вісь може бути удвічі довшою за меншу вісь.
Пункти Обрізати найяскравіші і Обрізати найтьмяніші надають змогу вилучити якусь частку найяскравіших або найтьмяніших зірок з розгляду. За допомогою пункту Обмеження насич. можна вилучити зірки, значення пікселів яких перевищують вказану частку максимального значення для пікселів — вилучити надто насичені зірки.
Ці параметр розв'язання зображень, здебільшого, стосуються обчислювальних ресурсів.
Радіус пошуку — відстань від позиції оцінки у градусах, де можна виконувати пошук, якщо позначено пункт Позиція.
Максимальний час — максимальна кількість секунд, протягом яких може працювати алгоритм розв'язування зображення, перш ніж буде зафіксовано перевищення часу очікування на результати.
Файли покажчика потрібні, якщо ви вибрали Вбудований розв'язувач або Локальну астрометрію як Метод розв'язання.
Для роботи автономних (та віддалених) розв'язувачів потрібні файли покажчиків. Повна збірка усіх файлів покажчиків є доволі об'ємною (понад 30 ГБ), але вам потрібно отримати лише ті з них, які відповідають вашій конфігурації обладнання. Файли покажчиків упорядковуються за діапазонами поля зору телескопа. Існує два способи отримання потрібних вам файлів: новий спосіб автоматичного отримання з модуля вирівнювання і старий спосіб встановлення вручну.
Автоматичним завантаженням можуть скористатися лише користувачі Ekos у Linux® та Mac® OS. Користувачам Windows® доведеться завантажити розв'язувач ANSVR окремо.
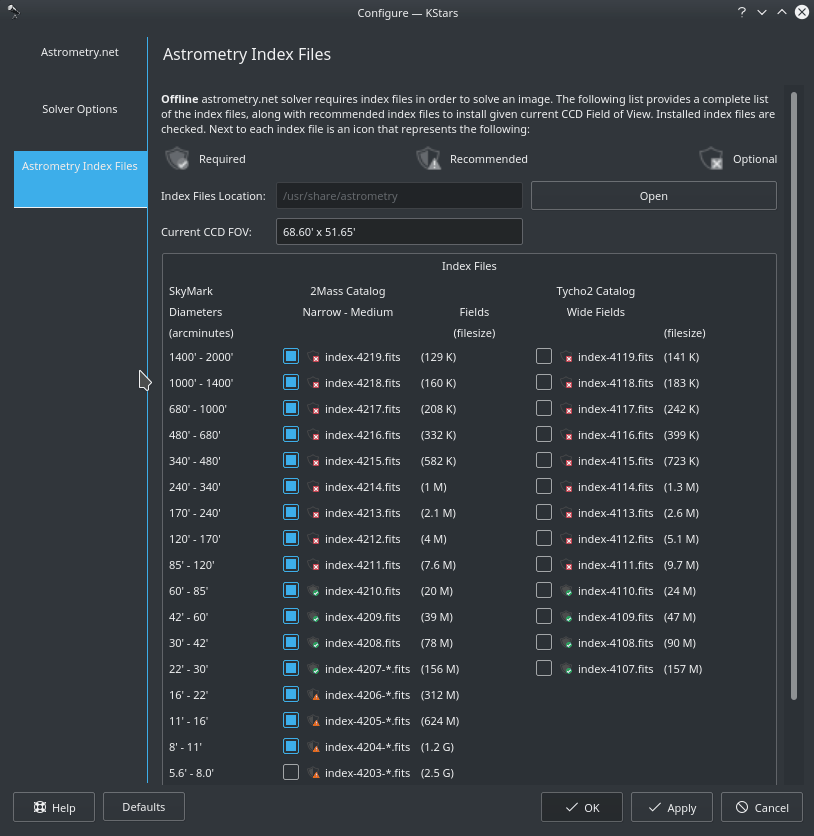
Щоб перейти на сторінку отримання даних, натисніть кнопку у вікні модуля вирівнювання і перейдіть на вкладку Файли астрометричного покажчика. На вкладці буде показано поточне налаштоване поле зору телескопа, а під ним список доступних і встановлених файлів покажчика. Для позначення важливості файлів покажчика для вашої поточної конфігурації передбачено три піктограми:
 Обов’язковий
Обов’язковий
 Рекомендований
Рекомендований
 Необов'язковий
Необов'язковий
Вам слід отримати усі потрібні файли і, якщо на вашому диску лишилося ще багато місця, усі файли рекомендованих покажчиків. Якщо файл покажчика встановлено, поряд з його пунктом ви побачите заповнене поле для позначки. Якщо ж файл ще не встановлено, позначте відповідний пункт, щоб програма отримала файл покажчика. Будь ласка, намагайтеся отримувати одночасно не більше одного файла, особливо це стосується великих файлів. Можливо, програма попросить вас ввести пароль адміністратора (типовим для StellarMate є пароль smate) для встановлення файлів. Щойно усі потрібні файли буде встановлено, ви зможете користуватися автономним розв'язувачем astrometry.net.
Вам слід отримати і встановити потрібні файли покажчика, які відповідають полю зору вашого телескопа і ПЗЗ. Встановити слід файли покажчика, які покривають діапазон від 100% до 10% поля зору. Наприклад, якщо поле зору складає 60 кутових мінут, вам слід встановити файли покажчика у діапазоні позначок від 6 кутових мінут (10%) до 60 кутових мінут (100%). У інтернеті можна знайти багато калькуляторів для обчислення поля зору. Прикладом такого калькулятора є Калькулятор поля зору Starizona.
Таблиця 5.1. Файли покажчика
| Назва файла покажчика | Поле зору (у кутових мінутах) | Пакунок Debian |
|---|---|---|
| index-4219.fits | 1400 – 2000 | astrometry-data-4208-4219 |
| index-4218.fits | 1000 – 1400 | |
| index-4217.fits | 680 – 1000 | |
| index-4216.fits | 480 – 680 | |
| index-4215.fits | 340 – 480 | |
| index-4214.fits | 240 – 340 | |
| index-4213.fits | 170 – 240 | |
| index-4212.fits | 120 – 170 | |
| index-4211.fits | 85 – 120 | |
| index-4210.fits | 60 – 85 | |
| index-4209.fits | 42 – 60 | |
| index-4208.fits | 30 – 42 | |
| index-4207-*.fits | 22 – 30 | astrometry-data-4207 |
| index-4206-*.fits | 16 – 22 | astrometry-data-4206 |
| index-4205-*.fits | 11 – 16 | astrometry-data-4205 |
| index-4204-*.fits | 8 – 11 | astrometry-data-4204 |
| index-4203-*.fits | 5.6 – 8.0 | astrometry-data-4203 |
| index-4202-*.fits | 4.0 – 5.6 | astrometry-data-4202 |
| index-4201-*.fits | 2.8 – 4.0 | astrometry-data-4201-1 astrometry-data-4201-2 astrometry-data-4201-3 astrometry-data-4201-4 |
| index-4200-*.fits | 2.0 – 2.8 | astrometry-data-4200-1 astrometry-data-4200-2 astrometry-data-4200-3 astrometry-data-4200-4 |
Пакунками Debian можна скористатися у будь-якому заснованому на Debian дистрибутиві (Ubuntu, Mint тощо). Якщо ви отримали пакунки Debian із наведеного вище списку для діапазону поля зору вашого телескопа, ви можете встановити їх за допомогою вашої улюбленої програми для встановлення пакунків або такої команди:
sudo dpkg -i astrometry-data-*.deb
З іншого боку, якщо вами отримано файли покажчика FITS безпосередньо, скопіюйте їх до каталогу /usr/share/astrometry.
Примітка
Рекомендуємо скористатися засобом керування отриманням даних, зокрема DownThemAll! для Firefox, для отримання пакунків Debian, оскільки у вбудованого засобу отримання даних можуть виникнути проблеми із отриманням дуже великих за об'ємом пакунків.
Потрібне, лише якщо ви виберете нерекомендований варіант Локальна астрометрія для Методу видобування даних з джерела.
Примітка
Astrometry.net вже є частиною програмного забезпечення StellarMate, отже немає потреби встановлювати програму. На StellarMate також встановлено файли покажчика для даних від 16 кутових мінут і вище (від 4206 до 4019). Додаткові файли покажчика можна встановити, якщо виникне потреба. Щоб скористатися астрометрією StellarMate на віддаленому модулі Ekos у системі Linux®/Windows®/Mac® OS, вам слід вибрати варіант у модулі вирівнювання Ekos. Крім того, виберіть драйвер у профілі вашого обладнання.
- Windows®
Щоб скористатися astrometry.net у Windows, вам слід отримати і встановити локальний розв'язувач Astrometry.net ANSVR. ANSVR відтворює поведінку віддаленого сервера astrometry.net на вашому локальному комп'ютері, тому, якщо ви ним скористаєтеся, для астрометричних запитів вам не знадобиться інтернет.
Після встановлення сервера ANSVR і відповідних файлів покажчика для вашого обладнання переконайтеся, що сервер ANSVR запущено, і що він є працездатним, а потім відкрийте вікно параметрів вирівнювання Ekos, де ви можете просто змінити Адресу програмного інтерфейсу так, щоб програма використовувала сервер ANSVR. Ілюстрацію наведено нижче:
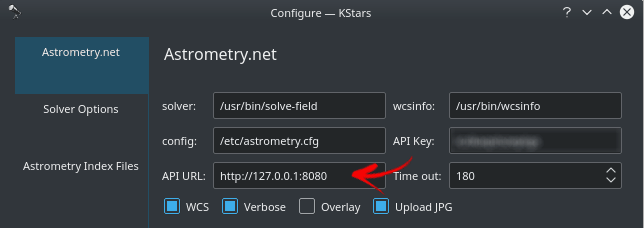
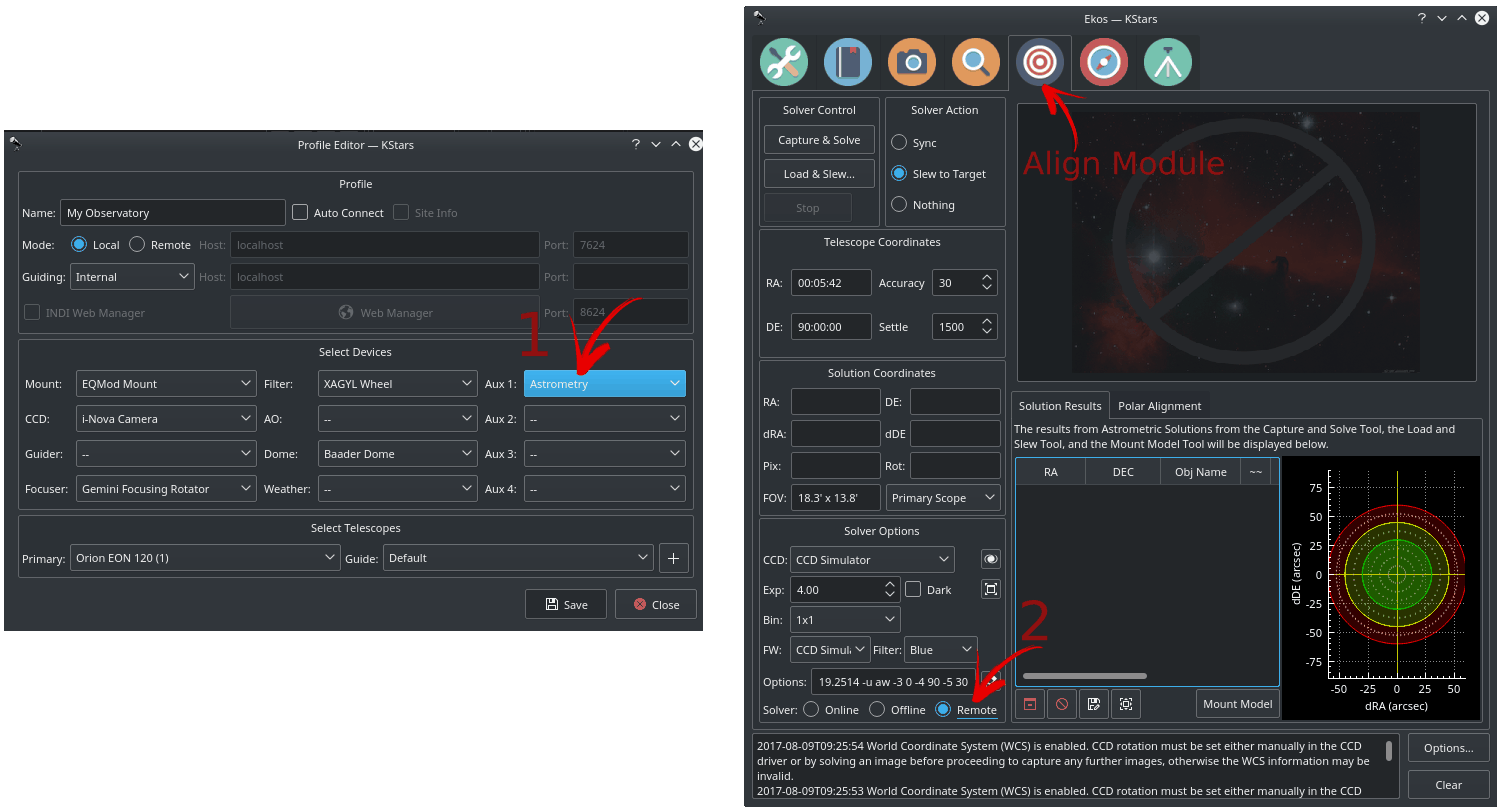
У модулі вирівнювання Ekos вам слід визначити тип розв'язувача як . Програма скористається локальним сервером ANSVR для виконання усіх астрометричних запитів. Далі, ви можете користуватися модулем вирівнювання у звичайному режимі.
Пам'ятайте, що, як було зазначено вище, на StellarMate вже встановлено astrometry.net. Тому, якщо ви хочете скористатися StellarMate для розв'язування ваших знімків, просто змініть тип розв'язувача на і переконайтеся, що до профілю вашого обладнання включено драйвер Astrometry, який можна вибрати у спадному списку Допоміжне обладнання. Це стосується усіх операційних систем, не лише Windows®.
- Mac® OS
Astrometry.net вже включено до складу KStars для Mac® OS, отже немає потреби встановлювати щось додатково.
- Linux®
Astrometry.net вже включено до найсвіжішої версії KStars. Але якщо засіб астрометрії не встановлено, ви можете встановити його за допомогою такої команди в Ubuntu:
sudo apt-get install astrometry.net
У модулі Ekos передбачено декілька інструментів, які допоможуть у правильному наведенні вашого телескопа. Для деяких лафетів корисно почати ваш сеанс із початкової позиції лафета, коли тубус телескопа спрямовано безпосередньо на небесний полюс. Для користувачів із північної півкулі Землі, можна навести телескоп якомога точніше на Полярну зірку. Потреби у виконанні 2 або 3 вирівнювань немає, але такі вирівнювання можуть бути корисними для деяких типів лафетів. Переконайтеся, що камеру телескопа фокусовано.
У верхній лівій частині сторінки «Вирівнювання» розташовано поля двох команд розв'язувача і дві кнопки для використання заданого розв'язку.
Захопити і розв'язати: захопити зображення і визначити точно область на небесній сфері, куди спрямовано телескоп. Астрометричні результати буде подано як екваторіальні координати (пряме сходження і схилення) центра захопленого зображення, а також масштаб пікселя на зображенні та кут обертання поля зору. Залежно від параметрів дій розв'язувача, результати можна використатися для синхронізації лафета або синхронізації лафета із обертанням до координат цілі. Наприклад, припустімо, ви навели лафет на Вегу і скористатися можливістю Захопити і розв'язати. Якщо телескоп навівся на якусь іншу зірку, не Вегу, спочатку координати лафета буде синхронізовано із обчисленими, а потім Ekos віддасть лафету команду навестися на Вегу. Після завершення процедури обертання до позиції Веги, модуль вирівнювання повторить процедуру захоплення і розв'язування зображення, аж доки похибка між даними лафета і справжнім спрямуванням телескопа не зменшиться до порогової (типово, 30 кутових секунд).
Завантажити і навести: завантажити файл FITS або JPEG, виконати астрометричне розв'язування і навести телескоп на місце знімка.
Застереження
Ніколи не розв'язуйте зображення небесного полюса або ділянки неба поряд із небесним полюсом (якщо ви не використовуєте інструмент «Помічник полярного вирівнювання» Ekos). Нахиліть телескоп принаймні на 20 градусів від небесного полюса, перш ніж розв'язувати перше зображення. Розв'язування зображень поряд із полюсами може призвести до проблем із наведенням лафета, тому його слід уникати.
Перш ніж ви розпочнете процедуру вирівнювання, виберіть бажаний оптичний тракт. Ви можете ознайомитися із параметрами astrometry.net, які передаються розв'язувачу astrometry.net кожного разу, коли програма захоплює зображення:
Точність: припустима різниця між бажаною цільовою позицією і визначеними розв'язанням координатами з захопленого зображення. Якщо різниця перевищить вказану кількість кутових секунд, система продовжуватиме захоплення зображень, розв'язування і наведення, аж доки позиція з розв'язку не стане достатньо близькою до цільової позиції.
Тракт: можливість вибрати оптичний тракт, який буде використано для захоплення зображення для вирівнювання. Також буде використано для обчислення масштабу зображення.
Витримка: тривалість експонування у секундах.
Крок: встановити крок розбиття зображення до розв'язування.
Підсилення/ISO: підсилення або ISO камери.
Фільтр/Поточний: фільтр, яким слід скористатися при захопленні зображення. Поточний означає «використовувати будь-який фільтр, який задіяно».
Темний: визначає, чи слід використовувати віднімання темного кадру до аналізу захопленого зображення.
При налаштування німецького екваторіального лафета (GEM) для створення знімків критичним аспектом є забезпечення належного полярного вирівнювання під час захоплення знімків із довгою витримкою. У лафетів GEM є дві вісі: вісь прямого сходження (RA) та вісь схилення (DE). За ідеальних умов, напрямок вісі RA має збігатися із полярною віссю небесної сфери. Завданням лафета є відстеження руху зірок небом з моменту появи зірки зі східної частини горизонту, усім шляхом вздовж траєкторії, аж до заходу зірки.
Помічник для полярного вирівнювання
При експонуванні із довгою витримкою камеру з'єднано із телескопом, а датчик зображення вловлює фотони, які випромінюються з певної ділянки неба. Вхідні фотони мають потрапляти на те саме місце на фотографії знову і знову, щоб знімок вийшов чітким і яскравим. Звичайно ж, за звичних умов така ситуація неможлива: розсіювання фотонів так чи інакше відбувається у оптичних елементах телескопа, атмосфері, внаслідок погіршення умов спостереження. Крім того, фотони не потрапляють у один піксель — ймовірнісний розподіл фотонів на поверхні можна описати розподілом Пуассона. Для точкових джерел світла, якими є зірки, за просторовий розподіл фотонів між пікселями відповідає певна функція розподілу. Отже, загальна ідея полягає у тому, що потрібно забезпечити потрапляння фотонів від одного джерела у ті самі пікселі. Якщо цього не зробити, зображення буде спотворено внаслідок зрушення об'єктів на ньому, яке можна спостерігати як «сліди» зірок.
Оскільки лафети не є ідеальними, вони не можуть ідеально стежити за рухом об'єкта небесною сферою. У порушенні ідеальності є багато причин, однією з яких є порушення вирівнювання вісі прямого сходження лафета відносно небесної полярної вісі. Полярне вирівнювання усуває одне з найсуттєвіших джерел похибок стеження лафета. Втім, інші причини при цьому лишаються. Деякі лафети при належному вирівнюванні здатні стежити за об'єктом протягом декількох хвилин із середньоквадратичним відхиленням у 1-2 кутові секунди.
Втім, якщо ви не є власником найякіснішого і найдорожчого лафета, ймовірно, ви захочете скористатися засобами автонаведення для фіксування телескопа на зірці протягом процесу створення знімків. Крім того, якщо вісь лафета не вирівняно щодо небесної вісі, навіть механічно досконалий лафет втратить фіксування на об'єкті за певний проміжок часу. Похибки стеження пропорційні до величини похибок вирівнювання вісі. Тому для створення зображень із довгою витримкою дуже важливо вирівняти вісь лафета полярно, щоб зменшити похибку наведення протягом процесу створення зображення.
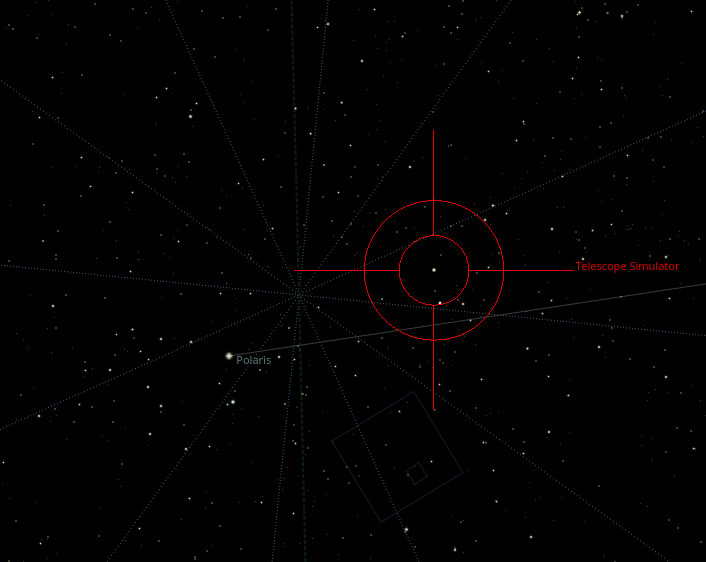
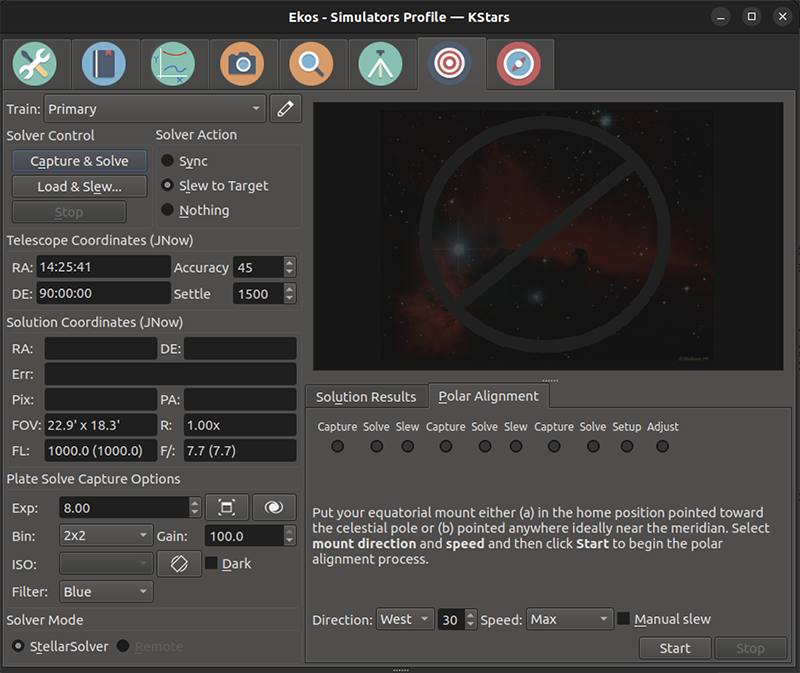
Перш ніж процес буде розпочато, наведіть лафет якомога ближче до небесного полюса із контрвагами внизу. Якщо ви мешкаєте у північній півкулі, наведіть лафет у позицію, якомога ближчу до Полярної. Якщо Полярну не видно (наприклад, заблоковано деревами або будинками) ви можете навестися на якусь іншу точку, бажано, поблизу меридіана. Переконайтеся, що видимими є принаймні 30-60 градусів неба на дузі від сходу до заходу меридіана від позиції, яку ви вибрали. Виберіть напрямок вільного від завад неба, кількість градусів для кожного з двох обертань, швидкість обертання лафета та те, обертатиметься лафет автоматично (рекомендовано) чи вручну.
Цей інструмент працює шляхом створення і розв'язування трьох зображень. Після захоплення кожного із зображень лафет обертається на введений вами фіксований крок, і програма захоплює і розв'язує наступне зображення. Якщо вами буде вибрано режим обертання вручну, вам слід повернути лафет приблизно на вибраний кут.
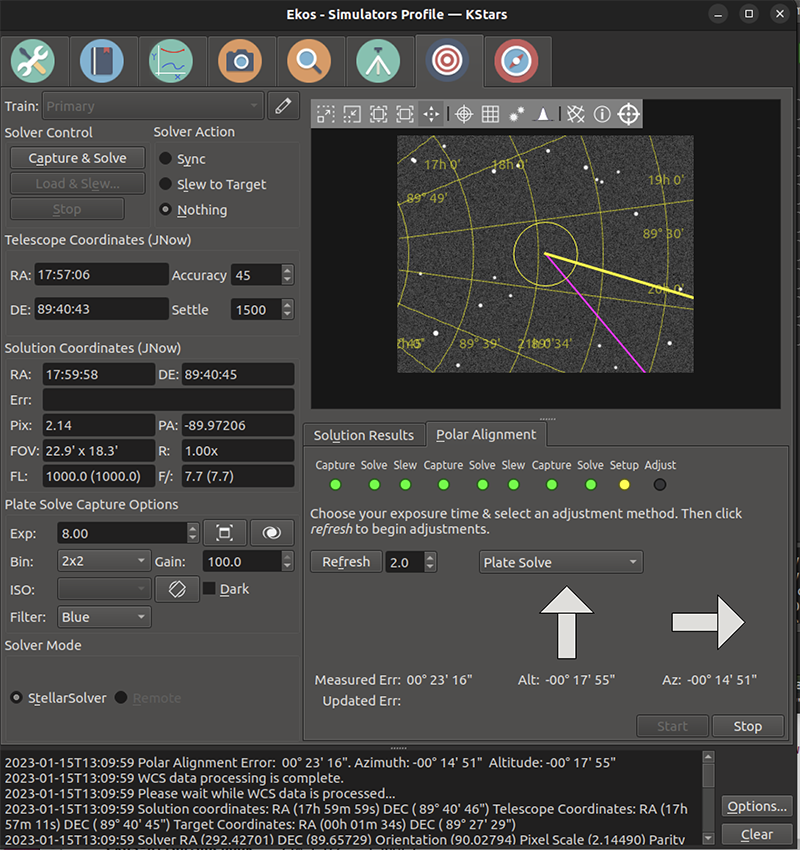
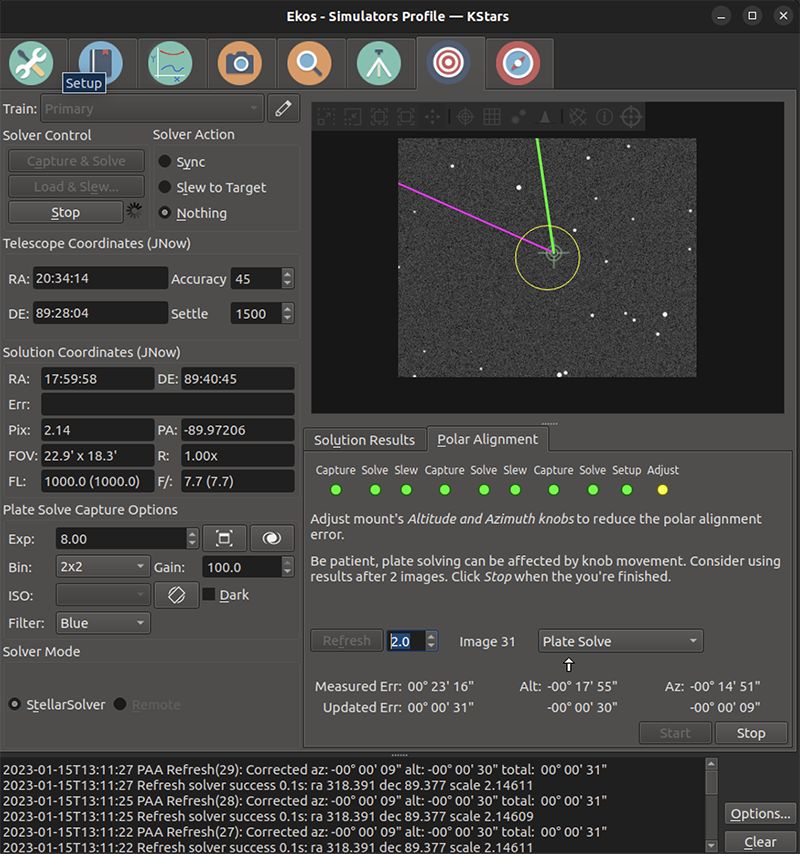
На наведених нижче зображеннях показано процедуру з використанням методики виправлення Розв'язання знімка. На наведеному нижче зображенні показано результат після захоплення і розв'язування трьох вимірювальних зображень. Показано похибку у майже 18' за висотою і те, що вісь лафета слід посунути вгору. Так само, показано похибку за азимутом у майже 15' і те, що вісь слід посунути праворуч (коли ви дивитеся з-за телескопа).
Якщо похибка досить низька (наприклад, менша за кутову мінуту) потреби у коригуванні немає. Просто натисніть кнопку «Стоп» і припиніть обробку.
Якщо ви виправлятимете вісь вашого лафета, вам слід вибрати підхід до коригування (у нашому прикладі ми використали розв'язання знімка) та те, наскільки часто система має повторно захоплювати зображення, щоб повторно вимінювати похибку у полярному вирівнюванні. Інтервал оновлення має бути достатньо малим, але немає сенсу оновлювати дані частіше, ніж процесор вашого комп'ютера може захоплювати і розв'язувати зображення. У цьому прикладі ми використали 2 секунди. Встановіть інтервал і натисніть кнопку , щоб розпочати процес виправлення.
Система виконає захоплення зображень і повторно оцінить похибку полярного вирівнювання після кожного зображення. Ви можете спробувати зменшити похибку коригуванням на регуляторах висоти і азимута вашого лафета. На зображенні нижче показано вікно після зведення похибки за висотою майже до нуля. Див. різницю між рядком Виміряна похибка, у якому показано початкову виміряну похибку після початкових 3 знімків, і рядок Оновлена похибка, де показано поточну оцінку похибки.
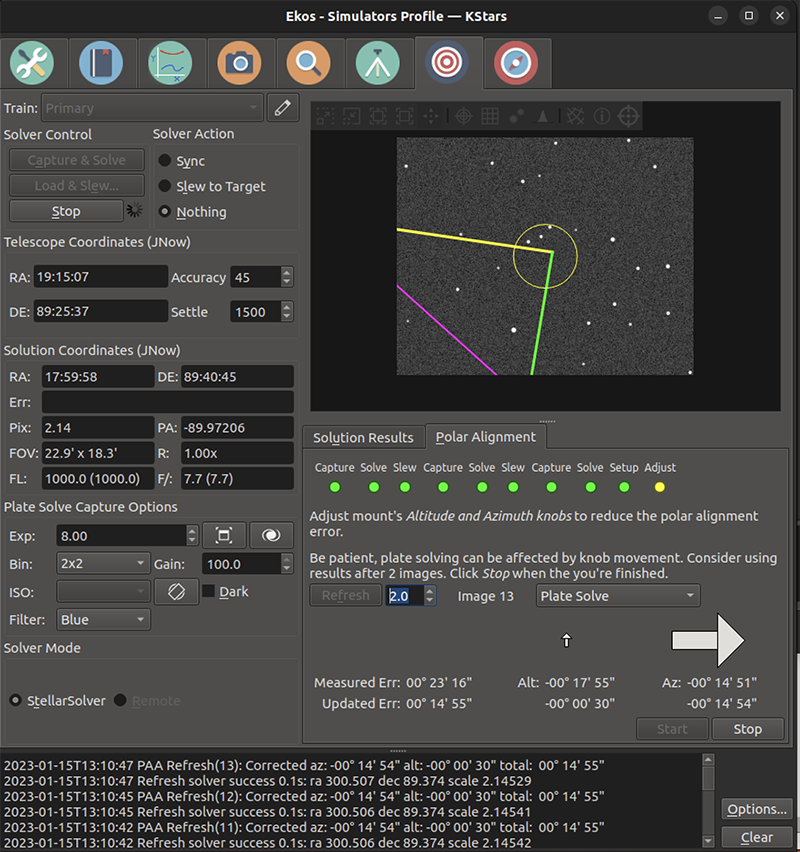
Нижче користувач також скоригував азимут для подальшого зменшення похибки. Тепер похибка є дуже низькою, і процес завершено. Користувач має натиснути кнопку «Стоп».
У нас також передбачено альтернативні схеми виправлення полярного вирівнювання. Двома варіантами є Пересування зірки і похибка і Пересування зірки. Якщо ви виберете цю схему, система розташує жовто-зелено-фіолетовий трикутник на екрані. Трикутник можна буде пересувати клацанням поряд із зіркою — жовто-фіолетовий кут буде пересунуто до цієї зірки. У цій схемі користувач виправляє полярне вирівнювання, спочатку коригуючи значення регулятора азимута лафета так, щоб вибрана зірка пересувалася уздовж жовтої сторони трикутника. Коли зірка опиниться поруч із наступною вершиною, регулятор азимута слід скоригувати так, щоб зірка почала рухатися уздовж зеленої сторони трикутника. Щойно зірка потрапить до зелено-фіолетової вершити, лафет вважатиметься полярно вирівняним. Користувач має натиснути кнопку Стоп.
Різниця між Пересування зірки і похибка і Пересування зірки полягає у тому, що при першому способі, система намагається стежити за вибраною користувачем зіркою і показує коло навколо цієї зірки. У цій схемі також оновлюється рядок Оновлена похибка. Якщо стеження за зіркою є ненадійним, просто ігноруйте його або скористайтеся схемою Пересування зірки і пересуньте зірку на око, аж доти, доки вона не стане близькою до остаточної цілі. Приклад використання цієї методики наведено у цьому відео: https://www.youtube.com/watch?v=iOp7hrxw0oU